产品简介:
组成:
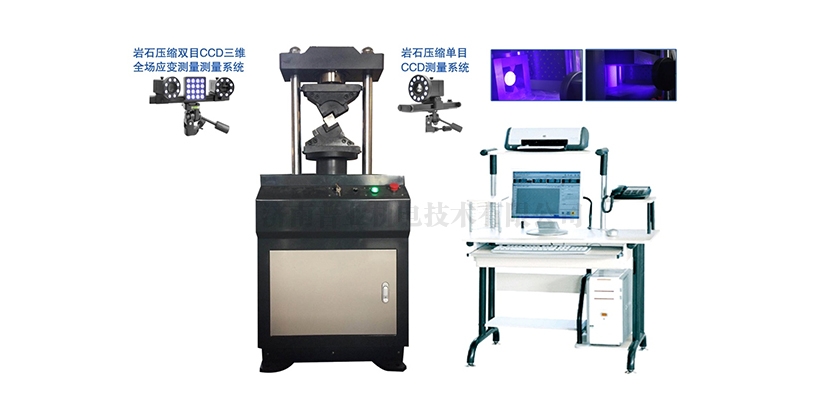
本试验系统由试验台架(刚性加载装置、伺服加载控制及数据采集系统、竖向均布载荷(电动伺服系统)加载机构、试验软件及计算机系统组成。用于矿山、地质、水利及建筑等领域。用扩大或缩小的模型研究对应原型的力学运动及其他相关特性。测量地压欠缺补偿情况下的时间、位移、载荷。计算弹性模量、压力、强度等参数。
刚性加载装置,由一个刚性加载架、一个相似实验材料充填槽和8组电子伺服油缸组成,钢质结构。装料腔1500*1500*200mm,特种型钢材质,在20t压力下每米变形小于0.001mm。加载架由内外框架的上横梁、底梁及两侧的竖梁组成一个封闭的受力框架。垂直加载架上横梁上配置8个垂向电子伺服缸。单个电子伺服缸工作时设计荷载25 kN。每个电子伺服缸均有位移测量传感器对电子伺服缸位移实时监测位移,测量范围1%-100%FS,位移分辨率0.001mm。
竖向均布载荷(电动伺服系统)加载机构:垂直加载系统由外侧上横梁、垂直电子伺服缸组及底梁组成。梁的安全系数大,具有足够的抗弯性能。垂向加载电子伺服缸均为双向伺服缸,均匀分布工作空间内,活塞杆与压板间采用刚性联结,压板间留10 mm间隙,以保证不形成梁式传递,同时均匀向试验体传递压力。
产品图片:
")
控制系统功能简介
可为200KN的电子伺服系统配套,控制也可配单通道至八通道闭环控制系统。伺服控制器可以选择接不同的控制方式:如伺服电机、伺服阀、比例阀等,,满 足不同作动器需要。控制系统见下图
")
该系统采用琴健式控制台:台湾研华工业控制计算机和显示器及伺服控制单元全部装入控制台内。
伺服控制单元在控制台内部,是整个控制系统的核心。主要由载荷、位移传感器驱动及放大部分,八通道伺服控制系统控制部分,信号发生部分(动态选配)等三大部分组成。主要完成对电子伺服缸的控制,将来自信号发生部分(给定信号)的命令与来自传感器驱动及放大部分的信号(反馈信号)进行比较、调节和处理后对电子伺服缸进行驱动,从而实现闭环控制。
工控机内有我公司自产工业控制D/A、A/D板,完成信号的采集、处理等工作。
本机所有操作通过控制台按键和计算机鼠标进行,非常方便。软件功能强大,界面友好,试验报告按要求打印输出。
软件优势
管理级PC机软件界面(PY-TEST)
该软件主要完成系统试验的定义、管理、监控和试验数据的处理等工作,提供易操作的人机界面而不参与实时控制,故采用了中文Win7操作平台。
")
波形显示界面(系统可以实现各种波形图例),如下图:
")
技术参数:
1、 控制:自动控制;
2、 垂直向最大单点负荷值:25kN;
3、 模型尺寸:装料腔1500*1500*200mm;
4、 加载点:8;
5、 力控速率调节范围:5N—1Kn/s
6、 位移等速率控制范围0.05~50mm/min
7、 单点力值控制精度:示值±0.5%
8、 单点载荷加载范围:1—100%FS
9、 同向协同加载时间:≤50m/s
10、保载时间:≮30天
11、保载过程载荷控制精度:示值±1%
12、电动伺服缸行程:200mm
13、位移测量精度:±1%
14、 同向同步、反向同步等协调加载控制;
15、 控制方式:可选择负荷、位移闭环控制方式、且可无冲击平滑切换;
16、 软件系统:中文win7工作平台,鼠标操作,在线提示,操作简便;
17、 自动调零:试验开始时,负荷、位移自动复零;
18、 自动存盘:试验条件参数和测试数据自动存盘,方便用户操作;
19、 显示方式:实现负荷、位移次数及其上下峰值、多种试验曲线全部工程量的显示;
20、 结果再现:试验结果可任意存取,对数据、曲线进行再分析;
21、 自动加载:各个试验参数设置完后,系统将实现自动加载;
22、 紧急停机:设有急停开关,用于紧急状态时切断系统电源;
23、 试验报告:按用户要求可设计试验报告格式;
24、 限位保护:具有软件和机械限位保护功能;
25、 过载保护:当负荷超过设定值时,自动停机;